Elektrik und Elektronik: Fahrtregelung
Impulsbreiten–Modulation
Die Realisation einer Impulsbreitenmodulation (PWM für englisch
„pulse width modulation”) wird hier zuerst behandelt.
Es wurden mehrere Muster gebaut, mit denen einige Erfahrungen gemacht werden konnten.
Hier wird eine Geschwindigkeits–Steuerung mit Impulsbreiten–Modulation vorgestellt, bei der
die Steuerelektronik mit 12 Volt betrieben wird, auch, wenn die eigentliche Betriebsspannung
für die Modelleisenbahn eine andere ist (zum Beispiel 20 Volt).
Abschnitte dieser Seite:
[ ± ].
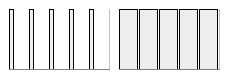
Spannungsverlauf bei
Impulsbreiten–Modulation (links langsam, rechts schnell).
Grundlagen
Eine Impulsbreitenmodulation besteht im Wesentlichen aus drei Teilen. Ihre Funktion wurde
schon bei den Prinzipien erklärt. Ein Taktgeber stellt eine Frequenz f mit der Zykluszeit
T zur Verfügung. Ein Modulator schaltet für eine Teilzeit
t1 des Zyklus die Versorgungsspannung ein und für eine
zweite Teilzeit t2 aus. Eine Endstufe sorgt dafür, dass
auch die benötigten Ströme (und Spannungen) geschaltet werden.
Optional kommen noch die Komponenten für eine Link zum Glossar
Massensimulation hinzu.
Die Frequenz muss einstellbar sein, um sie an die verwendeten Motoren–Typen anpassen zu können.
Frequenz–Generator und Modulator lassen sich leicht aus einem IC NE556
aufbauen (der Kombination aus zwei Zeitschaltkreisen NE555).
Transistoren als Schalter (in Kollektor–Grundschaltung) sind Leistungsgrenzen gesetzt.
So kann der NPN–Transistor 2N3055 - eine
preiswerte, weil verbreitete Type - maximal 125 Watt Leistung verarbeiten. Bei einer
Fahrspannung von 23,5 Volt ist also bei etwa 5 Ampère Strom Schluss. Kombinierte
Darlington–Transistoren (zum Beispiel TIP 140)
können Sie meist nicht als Schalter verwenden, weil diese fast immer eingebaute Freilauf–Dioden
haben und sich daher nur als Regler eignen, nicht jedoch als Schalter.
Die hier vorgestellte Impulsbreiten–Modulation erläutert nur das Prinzip und ist mit
ihrer geringen Frequenz nicht optimal. Es sollte Ihnen nicht zu schwer fallen, geeignete
Werte für höhere Frequenzen zu finden. Die nötigen Erklärungen hierzu gibt es bei den Zeitschaltungen.
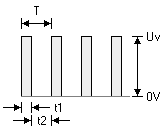
[ ± ].
Spannungsverlauf bei Impulsbreiten–Modulation (2).
Die Steuerspannung
Wenn Ihre Modellbahn mit mehr 15 Volt oder weniger als etwa 6 Volt fährt und Sie
nicht sowieso eine Elektronik–Hilfsspeisung haben, sollten Sie diese jetzt zunächst realisieren,
denn die werden Sie noch häufig benötigen. 12 Volt sind für diese Versorgung ideal. Für
manche Aufgaben werden Sie auch 5 oder 6 Volt brauchen.
Die folgenden Schaltpläne sind für 12 Volt ausgelegt. Mit „Uv” ist dort diese Steuerspannung gemeint, nicht die Fahrspannung.
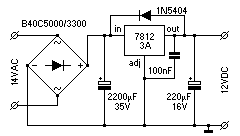
Der Schaltplan zeigt die andernorts
besprochene Schaltung mit einem Festspannungsregler 7812 für maximal 3 Ampère (A) Strom.
Unten wird die Leitungsführung für eine Platinenvorlage (also von unten
gesehen) gezeigt. Ob Sie nun 2.200 und 220 µF oder 1.000 und 100 µF für die
Glättungs–Elkos nehmen, ist fast schon Geschmackssache. Solange in diesem Stromkreis
keine wesentlichen Stromschwankungen eintreten, tut es die „kleine Kombination”.
Wichtig ist natürlich, dass die Masse dieser Schaltung mit der der Impulsbreiten–Modulation verbunden wird.
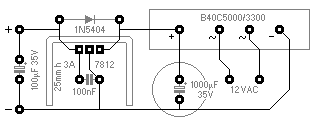
[ ± ].
Bereitstellen der Steuerspannung.
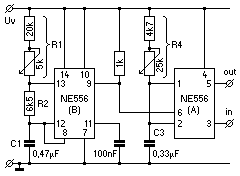
Generator
Eine Hälfte B des NE556 ist als astabiler Multivibrator
beschaltet. Er ist der Taktgeber für die Frequenz. Diese wird von R1,
R2 und C1 bestimmt. Bei den angegebenen Werten lässt sich der Generator zwischen folgenden Grenzwerten einstellen:
R1 + R2 =
25 kΩ
Frequenz f = 80,8 Hz, An–Zeit 10,2 ms (milliSekunden),
Auszeit 0,21 ms, Zykluszeit 12,0 ms und
R1 + R2 =
20 kΩ
Frequenz f = 93,0 Hz, An–Zeit 8,6 ms,
Auszeit 0,21 ms, Zykluszeit 10,7 ms,
in der Mitte bei R1 + R2 = 22k5 sind es
Frequenz f = 86,5 Hz, An–Zeit 9,4 ms,
Auszeit 0,21 ms, Zykluszeit 11,5 ms.
Während der An–Zeit ist der Ausgang des Generators positiv. Sobald er niedrig wird, wird
durch die negative Flanke die zweite Hälfte des IC gestartet, also zwischen
81 und 93 mal je Sekunde. Der Startimpuls für den Modulator sollte nicht unter
0,2 ms abfallen. Es kann also sein, dass sie andere
Widerstands–Kombinationen verwenden müssen oder einen anderen Kondensator.
Probieren Sie es eventuell mit einer Kombination aus R1 und Rv aus
10k und 39 k, R2 1k8 und C1 0,33 µF.
Diese Werte wurden auch beim „Labormuster” verwendet und ergeben eine Aus–Zeit von
0,4 ms. Ein Online–Berechnungs–Formular finden Sie beim
astabilen Multivibrator.
[ ± ].
Generator und Modulator der Impulsbreiten–Modulation.
Modulator
Die zweite Hälfte A (aus praktischen Gründen hier eigentlich die erste) des NE556
ist der eigentliche Modulator. Sie ist als monostabiler Vibrator
(Monoflop) beschaltet. Nach jeder negativen Flanke am Eingang wird
der Ausgang für einige Zeit positiv sein. Diese Zeit wird durch R4 (eigentlich
5 + 6) und C3 bestimmt. Bei der hier angegebenen Beschaltung (R 4k7,
Poti 25 k und C 0,33µF) wird
der Impuls zwischen 1,7 und 10,8 ms betragen.
Der Startimpuls für den Modulator (also die Auszeit des Generators) darf nicht kürzer
sein als die Impulsdauer am Ausgang des Modulators, denn sonst würden Zyklen
übersprungen, eine gewisse Mindestdauer sollte er aber schon haben (vergleiche oben).
Pin 5 ist der Ausgang des Modulators. Er wird die Transistoren
am Ausgang (eine Darlington–Kollektor–Schaltung) treiben.
Pin 3 ist der „Control Voltage”–Eingang des NE556 (A). Wie schon beim
Innenleben des NE555
erklärt, kann damit die Zykluszeit des Schaltkreises in einem Verhältnis von
1 zu 10 geregelt werden (2/3 Uv bis Uv = länger,
GND bis 2/3
Uv = kürzer).
Dies ist bei der Impulsbreiten–Modulation die Stelle, die mit dem Ausgang der Schaltung, die
den letzten Zustand erhalten soll, verbunden wird. Daraus ergibt sich die Link zum Glossar
hot plug–Fähigkeit des
Link zum Glossar
WAC, und da wird auch die
Link zum Glossar
Massensimulation integriert. An dieser Stelle
wird die Impulsdauer und damit letztendlich die Geschwindigkeit des Triebfahrzeugs gesteuert.
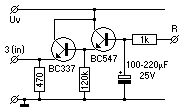
Schnittstelle
Um den Elko (Elektrolyt–Kondensator), der den aktuellen Zustand der Steuerung speichern soll,
möglichst wenig zu belasten, steuert dieser ein als Darlington–Emitterfolger
geschaltetes Transistorpaar an. Diese Schaltung ist hier zu sehen. Der Ausgang (ausnahmsweise
links) wird mit Pin 3 des NE556 verbunden.
Der Eingang R (ausnahmsweise rechts) kann nun über mehr oder minder
große beziehungsweise gar keine Widerstände mit Uv (solange Uv
aus diesem Stromkreis stammt!) oder GND (Minus)
verbunden werden. Dadurch wird der Elko mehr oder minder schnell ge– und entladen,
was die gewünschte Zyklus–Veränderung im Modulator zur Folge haben wird.
[ ± ].
Schnittstelle der Impulsbreiten–Modulation.
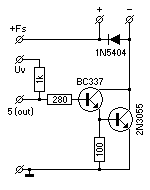
Endstufe
Die Beschaltung der Darlington–Endstufe am Ausgang hängt von
dem zu schaltenden Strom und der Fahrspannung Fs ab. Sie müssen die Basis–
und Emitter–Widerstände bei Bedarf gegenüber den Werten rechts anpassen.
Achten Sie bitte unbedingt auf die Freilauf–Diode. Beim Ausschalten der Motoren geben diese
Spannungsspitzen von etlichen Dutzend Volt ab, die die Transistoren eventuell schädigen könnten. Hier folgt die gesamte Schaltung im Überblick.
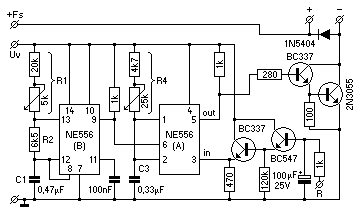
[ ± ].
Verstärker der Impulsbreiten–Modulation.