Elektrik und Elektronik: Fahrtregelung
Einleitung
Hier werden ausschließlich Gleichstrom–Modellbahnen und ihre analoge Fahrstrom–Versorgung behandelt.
Digitale Steuerungen werden in einem eigenen Bereich besprochen.
Das Thema ist so umfangreich, dass es auf mehrere Seiten aufgeteilt wurde. Im ersten Teil geht es um die verschiedenen Steuerungs–Arten.
Jeder muss für sich selbst entscheiden, welches System seinen Ansprüchen am Besten gerecht wird.
Versuche mit umschaltbaren Systemen haben gezeigt, dass dies mit vertretbarem Aufwand auch machbar ist.
Sie sollten diese Seiten aufmerksam lesen, wenn Sie sich selbst ein „Fahrpult” bauen oder erweitern wollen,
weil eingestreut etliche Tipps und Hinweise mit Lösungen zu finden sind, beispielsweise zu diesen Themen:
Wahlfreie Taster– und Drehknopf–Steuerung ·
Elektronik–Hilfsspeisung ·
Darlington–Endstufe als Schalter und als Regler ·
Parallele Mindestspannungen · Konstantbeleuchtung
und –rauch · Multiplexer und Demultiplexer.
Prinzipien
Abschnitte dieser Seite:
- Bedingungen und Anforderungen
- Stelltransformatore
- Transistor–Regelung
- Phasenanschnitt–Steuerung
- Impulsbreiten–Modulation
- Überlagerung
- Massensimulation

Bedingungen und Anforderungen
Mit Fahrtregelung ist die Technik gemeint, wie die Geschwindigkeit Ihrer Modellbahn–Triebfahrzeuge
gesteuert wird. Die Fahrtrichtungs–Änderung ist Thema eines anderen Beitrags.
An die Geschwindigkeits–Steuerung von Modellbahn–Triebfahrzeugen (TFz) werden allerlei Anforderungen gestellt.
- Möglichst stufenlose, zumindest aber feinfühlige Regelung
- Ruckfreie Fahrt
- Möglichst geringe Mindestgeschwindigkeit
- Ruckfreies Anfahren
- Wählbare Höchstgeschwindigkeit
- Möglichst hohe Zugkraft auch bei geringen Geschwindigkeiten
- Keine Störsignale (zum Beispiel Störung des Rundfunkempfangs)
- Frei wählbare Bedienungselemente (Drehknopf oder Taster oder beides)
- Optional: Programmatische Ansteuerbarkeit (von außen)
Die Erfüllung dieser Bedingungen hängt teilweise stark von den verwendeten Motoren ab. Dreipolige Motoren sind wegen der
120 Grad zwischen den einzelnen Magnetfeldern denkbar ungeeignet, solche mit fünf Polen schon besser, solche mit sieben
Polen noch besser. Am besten sind Glockenankermotoren (System „Faulhaber”). Letztere haben kein magnetisches Rastmoment
und eine hohe Linearität zwischen Spannung und Drehzahl sowie eine Drehzahl–Konstante (Umdrehungen je Minute je Volt Spannung).
Stelltransformatore
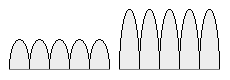
Die meisten handelsüblichen Modellbahn–Transformatore mit Drehknopf–Steuerung sind
Stelltransformatore. An einer Seite der Sekundär–Wicklung sind die Oberseiten des
Kupferlackdrahts nicht isoliert. Ein federnder Schleifer an der Unterseite des Drehknopfs
greift die Spannung bei weniger oder mehr Wicklungen ab. In der Mitte wird die Fahrtrichtung
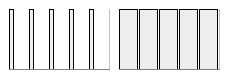
umgepolt. Dabei entstehen bei mittlerer und voller Fahrt die im Bild gezeigten Spannungsverläufe.
Die Lösung hat den Vorteil, dass a) die Motoren durch die Halbwellen schon recht gut
angestoßen werden und b) kein überschüssiger Strom in Wärme umgewandelt wird, weil er gar nicht
erst entsteht. Sie hat jedoch den Nachteil einer wenig feinfühligen Regelung, und den,
dass die Fahrspannung nicht programmatisch beeinflusst werden kann.
Bei Systemen, bei denen die Spannung geregelt wird, entsteht außerdem immer der Nachteil,
dass die Motore bei niedriger Spannung auch nur wenig Strom ziehen können. Die Zugkraft
wird also bei Langsamfahrt gering sein. Dementsprechend schwer werden die magnetischen
Rastmomente überwunden. Das Anfahrverhalten wird schlechter und die Zugkraft geringer.
[ ± ].
Spannungsverlauf bei Stelltrafos.
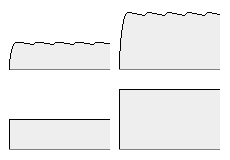
Transistor–Regelung
Sowohl die oben gezeigten Halbwellen als auch geglättete Spannungen können auch über
(ausreichend dimensionierte!) Transistoren geregelt werden. Dadurch entstehen entweder
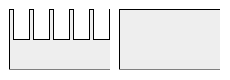
die oben oder die in diesem Abschnitt gezeigten, fast und ganz geglätteten Spannungsverläufe.
Die geglätteten Spannungen sind für konventionelle Motoren denkbar ungeeignet, da diese
ihre Trägheit am schlechtesten überwinden können. Für vielpolige, bürstenlose und
Glockenanker–Motoren ist die Versorgungsform jedoch einigermaßen geeignet.
Ein weiterer - sehr großer - Nachteil ist, dass überflüssiger Strom vollständig in Wärme umgewandelt werden muss. Dazu später mehr.
Die Steuerung über Leistungstransistoren oder gleich
Link zum Glossar MOSFETs
hat mehrere Vorteile. Es kann problemlos eine
Link zum Glossar Massensimulation
angesetzt werden. Die Fahrspannung kann von außen programmatisch gesteuert werden, und es ist
möglich, auch ohne die Massensimulation den letzten Zustand zu erhalten. Das ist wichtig, damit
Handregler im laufenden Betrieb gewechselt beziehungsweise abgezogen und wieder angesteckt werden können. Auch dazu später mehr.
[ ± ].
Spannungsverlauf bei Transistor–Regelungen.
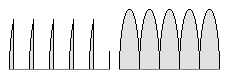
Phasenanschnitt–Steuerung
Die Technik der Phasenanschnitt–Steuerung wird nur der Vollständigkeit halber aufgeführt.
Sie hat nämlich nur den Vorteil, dass kein Strom in Wärme umgewandelt werden muss, obwohl über Transistoren (meist
Link zum Glossar
UJT–Typen)
geregelt wird. Die Nachteile überwiegen jedoch: schlechtes Anfahrverhalten und vor allem
eine kaum zu kontrollierende Störung des Rundfunkempfangs.
Bei dieser Steuerungsform werden Teile der Halbwellen (Phasen) abgeschnitten, übrig bleibt ein Anschnitt einer Halbwelle (siehe Bild).
![[ b ]](/beschreibung/dvi-240.jpg){kind=link}
![[ b ]](/beschreibung/el/el-dnse-000.png){kind=link}
![[ b ]](/beschreibung/el/el-rtyp-002.png){kind=link}
Impulsbreiten–Modulation
Bei der Impulsbreiten–Modulation erhält der Motor stets die volle Versorgungsspannung.
Die Drehzahl wird darüber geregelt, wie lang er diese erhält. Es gibt eine feste
Frequenz (die über der der Netzspannung von 50 Hz liegen muss).
Ein Zyklus setzt sich aus der Einschaltzeit t1 und die Ausschaltzeit t2
zusammen. Ist t1 sehr klein und t2 sehr groß, wird der Motor
auf Grund seiner Trägheit sich zwar wohl drehen, aber nur sehr langsam. Während t1 kann er den vollen Strom ziehen.
Anders sieht es aus, wenn t1 länger und t2 kürzer wird wird.
Der Motor kann nun innerhalb des Zyklus mehr Arbeit verrichten, er wird sich schneller drehen,
da er insgesamt länger mit Strom versorgt wird. Der Strom wird schlagartig ein– und
ausgeschaltet, es entstehen also rechteckige Impulse (siehe Bild). Überschüssige Energie wird nicht in Wärme umgewandelt.
Das ist auch der Grund, warum nahezu alle Fahrtregler für Funk–ferngesteuerte Modelle sich dieser Technik bedienen.
Das Anfahrverhalten so angesteuerter Motoren ist natürlich das bestmögliche. Auch die
Feinfühligkeit der Regelung ist gegeben. Theoretisch ist damit die Impulsbreiten–Modulation
(englisch PWM, „pulse width modulation”) die ideale Steuerungsart.
Leider hat das Verfahren aber auch kleine Nachteile. Die Frequenz muss zum Antrieb passen.
Bei zu niedrigen Frequenzen brummt und ruckt der Motor, bei zu hohen kann er deutlich zu heiss werden.
Auch bei einer geeigneten Frequenz werden die Motoren immer noch unangenehm warm und
geben bis zu einer Frequenz von etwa 3 kiloHertz (kHz) einen pfeifenden Ton ab. Für
sehr leicht laufende Motoren ist die Technik nur geeignet, wenn die Frequenz hoch genug ist,
jedenfalls höher als 500 Hertz. Glockenankermotore werden sonst unter Umständen unzulässig belastet.
Es gibt heutzutage Systeme, die zufrieden stellend mit etwa 3 bis 20 kHz
arbeiten. Da sollen die angesprochenen Probleme weniger oder gar nicht auftreten.
[ ± ].
Spannungsverlauf bei Impulsbreiten–Modulation.
Überlagerung
Eine interessante Möglichkeit ergibt sich, wenn einer geglätteten Gleichspannung
rechteckige Signale überlagert werden (vergleiche Bild rechts).
Angenommen, ein Motor kann aus einer geglätteten Gleichspannung gerade noch nicht
soviel Strom ziehen, dass er sein Trägkeitsmoment überwinden kann, so wird er es tun,
wenn eine Art „Hilfsimpuls” einer höheren Spannung eintrifft.
Es ist an sich sinnlos, eine normale Impulsbreiten–Modulation mit einer geglätteten
Gleichspannung zu kombinieren. In bestimmten Situation gilt das jedoch nicht, beispielsweise,
wenn die Grundspannung schon 1/3 der Versorgungsspannung
(Uv) beträgt. Außerdem wäre es denkbar, die Hilfsimpulse nur mit einer sehr niedrigen Frequenz zu überlagern.
Ebenfalls ist es möglich, nur zum Zweck des Anfahrens einen kurzen Impuls mit hoher
Spannung „abzufeuern” der der Lok „auf die Sprünge” hilft (Anfahr–Hilfsschaltung).
[ ± ].
Spannungsverlauf bei Überlagerung.
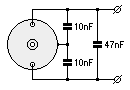
Massensimulation
Das Prinzip der Massensimulation wurde schon unter Grundschaltungen
kurz besprochen. Dabei dreht es sich darum, nicht vorhandene oder durch hemmende Schneckengetriebe
aufgehobene Massenträgheit auf elektronischem Wege zu simulieren. Hierfür werden - wie im Schaltbild rechts -
Kombinationen aus Widerständen (R2) und Kondensatoren (C) verwendet.
Diese Technik ermöglicht Vorbild–gerechte Verzögerungen beim Anfahren und Bremsen. Wie die
Werte für beides gesondert eingestellt werden können, wird später beschrieben.
Auch diese Technik hat einen kleinen Nachteil. Gelegentlich ist es nämlich nötig,
dass ein Triebfahrzeug den Anweisungen direkt folgt, beispielsweise um eine störrische
Kupplung zum Einrasten zu bewegen. In solchen Fällen sollte eine vorhandene Massensimulation kurzfristig ausschaltbar sein.
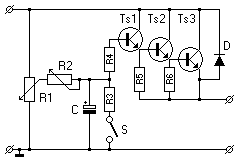
[ ± ].
Elektronisches „Schwungrad”.