Fahrtrichtungs–Erkennung
Bei der Modelleisenbahn ist es für die Automatisierung und Sicherungsaufgaben oft wichtig,
die Fahrtrichtung eines (beliebigen) Fahrzeugs zu kennen. Bei analog mit Gleichstrom betriebenen
Modellbahnen ist diese Information leicht zu gewinnen (aus der Polarität am Gleis). Das gilt
jedoch weder für abrollende Wagen noch für mit Wechselstrom oder digital betriebene Bahnen.
Andernorts
wurde schon die bestmögliche Lösung angesprochen: Ein Flipflop
als Ansteuerung der Fahrtrichtungs–Änderung, das gleichzeitig ein Signal gegen
GND (Masse) bei einer von zwei Fahrtrichtungen
bereit stellt. Wenn dieses Signal verfügbar ist, brauchen Sie hier nicht weiter zu lesen.
Hier wird erklärt, wie Sie so eine Information lokal gewinnen können - voraus gesetzt,
Sie führen die Elektronik–Hilfsspeisung Uv über Ihre Anlage.
Abschnitte dieser Seite:
Grundlagen
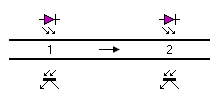
Das Erkennungs–Verfahren funktioniert wie folgt: In einem relevanten Gleisstück sind zwei Fahrzeug–Erkennungen
angebracht, beispielweise mit Infrarot–Lichtschranken. Relevant heißt, dass die Erkennung
entweder über mehrere parallele Gleise hinweg funktionieren oder in einem einzelnen Gleis liegen muss.
Der bekannte Vorschlag, die zuerst ausgelöste Information (rechter oder linker Kontakt)
über gegenseitig sperrende Monoflops auszuwerten, ist gleichzeitig auch der beste.
Trifft ein Fahrzeug am zweiten Erkennungspunkt an, ist das dazu gehörige
Monoflop über das erste (noch anliegende) Signal gesperrt.
Bedingung ist nur, dass der Zug während der Haltzeit der Monoflops
beide Lichtschranken durchfährt. Der naheliegende Schluss, dafür lieber Triebfahrzeug–Erkennungen
mit Magnet und Reed–Relais–Kombinationen
zu nutzen, ist nur bedingt richtig: Bei geschobenen Zügen kann die Entfernung zwischen zu schützender Stelle und Triebfahrzeug zu groß werden.
Sie können für dieses Verfahren die unter Fahrzeug–Erkennung
vorgestellte Schaltung (mit einer nur teilweisen Bestückung der Platine) unverändert nutzen.
Dieses Thema ist ganz besonders im Digital–Betrieb interessant. Da dort jedes Triebfahrzeug
individuell umgepolt wird, gibt es keine allgemein gültige Information zu dessen Fahrtrichtung.
Da bleibt eigentlich nur die Frage: Wie bringe ich ein Monoflop dazu, ein anderes zu sperren?
[ ± ].
Prinzip der Fahrtrichtungs–Erkennung.
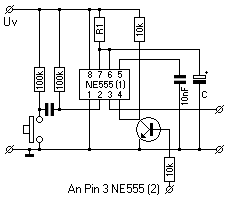
Gegenseitig sperrende Monoflops
Mindestens zwei Lösungs–Ansätze führen dazu, dass sich zwei der bekannten
Monoflops wechselseitig sperren.
Einer davon ist, den Reset–Eingang an Pin 4
des NE555 zu nutzen. Solange der Ausgang des einen Monoflops
an Pin 3 positiv ist (Zyklus läuft), kann das andere über einen NPN–Transistor (BC547) mit
10 kΩ
Basiswiderstand in Kollektorschaltung, dessen Emitter mit GND (Masse) und dessen
Kollektor mit Pin 4 des anderen verbunden ist, im
Reset–Zustand gehalten werden. Diese Idee stammt von Boris Kuschel (siehe Schaltplan in diesem Abschnitt).
Die zweite Lösung ist einfacher, hat aber auch gewisse Nachteile, weswegen sie hier nicht
weiter besprochen werden soll. Dort wird beim Auslösen des einen Monoflops
der Ausgang des anderen über einen Widerstand und eine Diode nach GND gezogen.
Da sowieso zwei NE555 benötigt werden, bietet sich die Entwicklung eines
Schaltplans und Layout–Entwurfs auf Basis des NE556 an.
Nach der Lektüre der vorherigen Seiten dieses Bereichs sollte die Umsetzung dieser
Schaltungen kein Problem mehr sein. Die grundsätzliche Idee hat aber auch einen Nachteil:
Solange kein Fahrzeug an der Erkennung vorbei gefahren ist, zum Beispiel
beim „Setup” der Anlage, liegt noch nicht unbedingt ein
Signal an dem richtigen Ausgang des Flipflops, das von diesen Monoflops
getrieben werden sollte. Daher gelten nach wie vor die bei Fahrtrichtungs–Änderung gegebenen Empfehlungen.
[ ± ].
Das Prinzip wechselseitig sperrender Monoflops.